Noticias
Investigadores «enseñan» a los robots a conectar sentidos como la vista y el tacto
Un equipo de investigadores del Laboratorio de Inteligencia Artificial y Ciencias de la computación (CSAIL) del MIT ha conseguido desarrollar una nueva Inteligencia Artificial capaz de sentir objetos sólo con verlos, y viceversa. Para ello, los investigadores han enseñado a los robots en los que la han integrado a conectar diversos sentidos, como la vista y el tacto, de una manera similar a como lo hacen los humanos.
Además, esta nueva Inteligencia Artificial puede predecir cómo sería un objeto por su toque, solo con mirarlo. Además, es capaz de generar una representación visual de un objeto tomando únicamente como base los datos táctiles que recoge cuando lo toca.
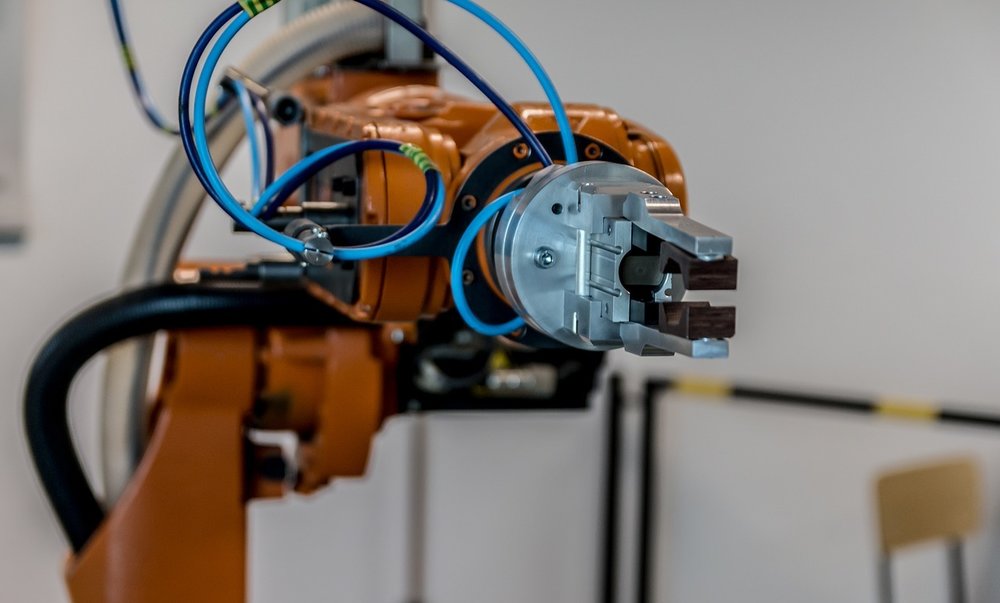
El equipo de investigadores ha utilizado en este proyecto, para los entrenamientos del sistema, un brazo robótico KUKA equipado con un sensor táctil especial, llamado GelSight. Este brazo se utilizó para tocar 200 objetos domésticos de uso cotidiano 12.000 veces, mientras los investigadores recogían la información visual y táctil. Con base en estos datos recopilados, crearon un conjunto de datos de 3 millones de imágenes visuales y táctiles, al que llamaron VisGel.
Además de VisGel, el equipo ha utilizado para desarrollar y entrenar a esta Inteligencia Artificial unos sistemas denominados redes adversarias generadoras (GAN). Estas utilizan imágenes táctiles o visuales para generar las imágenes correspondientes de la otra modalidad. Es decir, con este modelo y a partir de las imágenes de VisGel, las redes GAN consiguieron desarrollar las imágenes del tacto a partir de las de la vista, y viceversa.
El principal autor del documento sobre esta nueva inteligencia artificial, el estudiante de doctorado del CSAIL Yunzhu Li, ha subrayado que el nuevo modelo puede ayudar a que los robots puedan sostener mejor objetos del mundo real.
Además, ha explicado que «al mirar la escena, nuestro modelo puede imaginar el sentimiento del tacto de una superficie plana o un borde afilado. Al tocar a ciegas a su alrededor, nuestro modelo puede predecir la interacción con el entorno, y hacerlo únicamente a partir de sentimientos de tacto. Al aunar estos dos sentidos se puede dar más seguridad al robot, además de reducir los datos que podemos necesitar para tareas que impliquen la manipulación y agarre de objetos«.
Los investigadores que han participado en el proyecto, que presentarán su trabajo en el evento The Conference on Computer Vision and Pattern Recognition esta semana, han recordado que el conjunto de datos con el que han entrenado estaba desarrollado con base a interacciones en un entorno controlado. Y esperan mejorarlo mediante la recogida de datos en áreas más desestructuradas que contribuyan al desarrollo del conjunto de datos.











Aumentan las previsiones de ingresos por venta de semiconductores en 2026

Sandisk presenta nuevas tarjetas de memoria Extreme PRO para creativos

Meta despedirá al 10% de sus empleados, y Microsoft quiere la salida voluntaria del 7% en EEUU

Crecen los EREs en España por la IA: al de Capgemini se suma el de Inetum

Google Cloud Next 26: hacia la empresa agéntica

CrowdStrike Falcon Data Security: seguridad de datos para detener el robo de información

Google libera Gemma 4, su modelo de IA de código abierto más avanzado

Anthropic lanza el Proyecto Glasswing para controlar la potencia de su propia IA en ciberataques

Los desafíos de ingeniería para construir los centros de datos para IA más grandes del mundo

Euro-Office, ofimática soberana open source de tecnológicas europeas para hacer frente a Microsoft

«Gran parte de la innovación en IA hoy proviene del código abierto»

Hong Kong vuelve a marcar la agenda tecnológica global: InnoEX y Electronics Fair (Spring Edition) 2026
Aumentan las previsiones de ingresos por venta de semiconductores en 2026
Hong Kong vuelve a marcar la agenda tecnológica global: InnoEX y Electronics Fair (Spring Edition) 2026

Apple Business, un servicio integral para empresas

Dell renueva su gama de ordenadores con IA y periféricos para profesionales
«Gran parte de la innovación en IA hoy proviene del código abierto»
Euro-Office, ofimática soberana open source de tecnológicas europeas para hacer frente a Microsoft
-

 NoticiasHace 6 días
NoticiasHace 6 díasJohn Ternus sucederá a Tim Cook como CEO de Apple
-

 NoticiasHace 7 días
NoticiasHace 7 díasLa Comisión Europea elige cuatro proveedores de servicios cloud para su nube soberana
-

 NoticiasHace 6 días
NoticiasHace 6 díasMicrosoft lanza un parche de emergencia para Windows Server
-

 ContentHace 6 días
ContentHace 6 díasBusiness Applications – Power Platform, Copilot y agentes de IA: la nueva era de la automatización inteligente