Noticias
Intel tendrá un papel clave en el programa RACER-Sim de DARPA

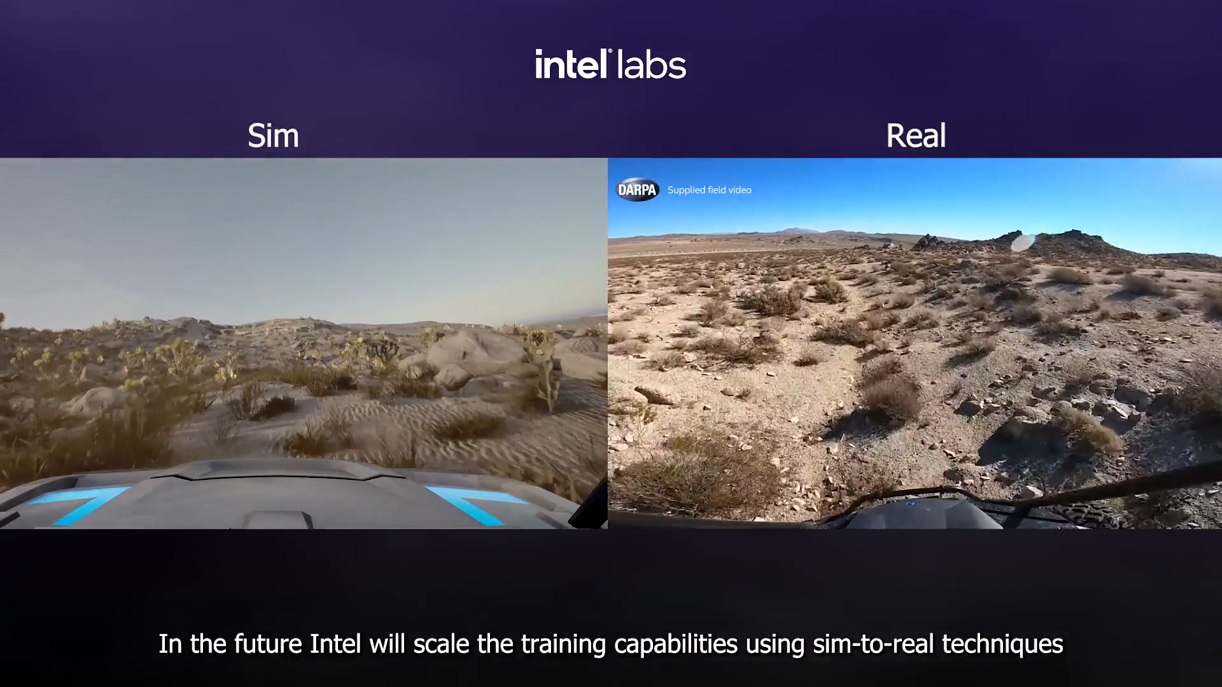
DARPA, siglas de la «Agencia de Proyectos de Investigación Avanzada de Defensa» de Estados Unidos, ha cerrado un acuerdo con Intel Federal LLC (apoyada por Intel Labs), el Centro de Visión por Ordenador de Barcelona (España) y la Universidad de Texas en Austin centrado en el desarrollo de soluciones avanzadas de simulación para vehículos autónomos de tipo «off-road», es decir, aquellos que están pensados para circular fuera de carretera.
Este acuerdo forma parte del programa «Robotic Autonomy in Complex Environments with Resiliency – Simulation», o RACER-Sim por sus siglas en inglés, y tiene como objetivo dar forma a la nueva generación de plataformas de simulación de vehículos «off-road» partiendo de dos grandes metas: reducir significativamente el coste de desarrollo y salvar la distancia entre la simulación y el mundo real.
No hay duda de que estamos ante un desafío importante, ¿pero por qué es tan importante? Pues muy sencillo, por que en el terreno de la conducción autónoma sigue habiendo una importante brecha entre el despliegue en carretera y fuera de ella. A día de hoy, hay muchos entornos de simulación, pero pocos están optimizados para el desarrollo de la autonomía fuera de la carretera en términos escala y velocidad.
Las demostraciones en el mundo real siguen siendo el principal método para verificar el rendimiento del sistema, y los vehículos autónomos todoterreno deben enfrentarse a importantes retos que, como habréis podido imaginar, derivan de las propias condiciones de los terrenos extremos por los que circulan. En ellos es fácil encontrar rocas y todo tipo de vegetación y de obstáculos que hacen que el desarrollo y las pruebas de simulación no solo sean muy lentas, sino también muy costosas.
Ahí es precisamente donde entra en juego el programa RACER-Sim, ya que pretende resolver este problema proporcionando tecnologías de simulación avanzadas para desarrollar y probar soluciones, reduciendo el tiempo de despliegue y validación de los sistemas autónomos impulsados por inteligencia artificial.
German Ros, Director del Laboratorio de Agentes Autónomos de Intel Labs, ha comentado:
«Intel Labs ya ha progresado en el avance de la simulación de vehículos autónomos a través de varios proyectos, incluido el simulador CARLA, y estamos orgullosos de participar en RACER-Sim para seguir contribuyendo a traspasar la próxima frontera de la robótica todoterreno y los vehículos autónomos. Por ello, hemos reunido a un equipo de expertos de renombre del Computer Vision Center y de la UT Austin con el objetivo de crear una plataforma versátil y abierta para acelerar el progreso de los robots todoterreno en todo tipo de entornos y condiciones».
Intel ha confirmado que el programa RACER-Sim se divide en dos fases distribuidas a lo largo de los 48 meses que durará el programa. Como ya hemos dicho, su objetivo será acelerar el proceso de investigación y desarrollo para el diseño de vehículos autónomos todoterreno.

En la primera fase, la meta de Intel es crear nuevas plataformas de simulación y herramientas de generación de mapas que imiten entornos todoterreno complejos con la máxima precisión (por ejemplo, física, modelado de sensores, complejidad del terreno, etc.) a escalas nunca antes vistas.
La creación de entornos de simulación a escala es un proceso que tradicionalmente requiere grandes recursos, por lo que representa uno de los mayores retos en los flujos de trabajo de simulación. Para superar ese desafío, la plataforma de simulación de Intel Labs permitirá la personalización de futuros mapas, incluida la creación de nuevos entornos masivos que cubran más de 258.998 kilómetros cuadrados con tan sólo unos pocos clics.
En la segunda fase, Intel Labs trabajará conjuntamente con los colaboradores de RACER para acelerar el proceso de investigación y desarrollo mediante la implementación de nuevos algoritmos sin el uso de un robot físico. Después, los equipos validarán el rendimiento del robot en la simulación, lo que supondrá un importante ahorro de tiempo y recursos.
Esta segunda fase también incluirá el desarrollo de nuevas técnicas «sim2real», centradas en entrenar al robot en la simulación para que adquiera habilidades y luego transferir estas habilidades al sistema robótico real correspondiente, que permitan el entrenamiento de vehículos autónomos todoterreno directamente en la simulación.












Samsung advierte que la crisis de las memorias se prolongará hasta 2028 y más allá…

Telefónica: Digitalización e IA, motores del crecimiento

Las Gigafábricas de IA europeas ya están en marcha

ASUS amplía su línea de monitores ProArt Display

¿Cuándo y cómo tengo que avisar que uso IA y etiquetarla?

Centros de datos espaciales, ventajas y desafíos

El TUE confirma la multa récord antimonopolio contra Google

«Proporcionamos ciberseguridad de gama alta a nuestros clientes, sin importar su tamaño»

La intrahistoria del primer ataque de Ransomware por IA sin intervención humana

¿Está preparado el comercio minorista para que los agentes de IA compren en nombre de los humanos?

Samsung supera a NVIDIA como la compañía más rentable del mundo

«La clave no es la IA, es la confianza en el dato»
Samsung advierte que la crisis de las memorias se prolongará hasta 2028 y más allá…

Meta desarrolla su propio negocio en la nube ¿La AWS de Zuckeberg?

Oracle España nombra Country Leader a Sergio Sáez

La gigafactoría española de IA concreta su directiva y va tomando forma
El TUE confirma la multa récord antimonopolio contra Google

La austriaca A1 Digital trae su oferta de nube soberana e IoT para empresas a España
-

 NoticiasHace 5 días
NoticiasHace 5 díasAMD presenta sus próximas arquitecturas ZEN 7 y ZEN 8
-
 NoticiasHace 5 días
NoticiasHace 5 díasAnthropic lanza Claude Opus 5 a la mitad de precio que Fable
-
 A FondoHace 4 días
A FondoHace 4 díasLíderes tecnológicos apoyan los modelos de IA de peso abierto
-

 Notas de prensaHace 7 días
Notas de prensaHace 7 díasIA y Datos redefinen la competitividad del sector turístico español